
Настройка фильтров RPM в Betaflight проста, нужно убедиться, что прошивка вашего FC (контроллера полета) и ESC (электронного контроллера скорости) обновлена. Если официальное руководство покажется вам сложным, это краткое руководство должно оказаться полезным. Фильтр RPM предназначен для снижения шума двигателя, что приводит к улучшению летных характеристик. Многие пилоты считают фильтр RPM лучшим вариантом фильтрации в Betaflight, поэтому его определенно стоит изучить.
Что такое RPM-фильтр
Фильтры Notch очень эффективны для устранения шума, что приводит к меньшей задержке сигнала по сравнению с фильтрами нижних частот с тем же уровнем затухания. Задача заключается в отслеживании пиковой частоты шума. Хотя динамический фильтр справляется с этим относительно хорошо, он отслеживает только одну частоту. Поскольку двигатели в квадрокоптере могут вращаться с разной скоростью (оборотов в минуту), они создают шум на разных частотах.
Фильтр RPM Betaflight — это мощный инструмент, который позволяет контроллеру полета вашего квадрокоптера отслеживать скорость вращения (RPM) ваших двигателей через двунаправленный DShot и устанавливать набор режекторных фильтров прямо на этой частоте и их гармониках. Эта функция помогает устранить вибрации, вызванные двигателями и пропеллерами, в конечном итоге улучшая летные характеристики.
Обновление прошивки ESC
ПЕРЕД ТЕМ КАК ДАЛЬШЕ ПРОДОЛЖИТЬ, СНИМИТЕ ВСЕ ПРОПЕЛЛЕРЫ.
Обновите ваш BLHeli_32 ESC до последней версии (версия 32.7 или новее), которая позволяет двунаправленный DShot, необходимую функцию для фильтра RPM.
Для регуляторов скорости BLHeli_S прошейте прошивку Bluejay для использования фильтров RPM.
Обновление Betaflight
Обновите FC до последней версии Betaflight.
Конфигурация Betaflight
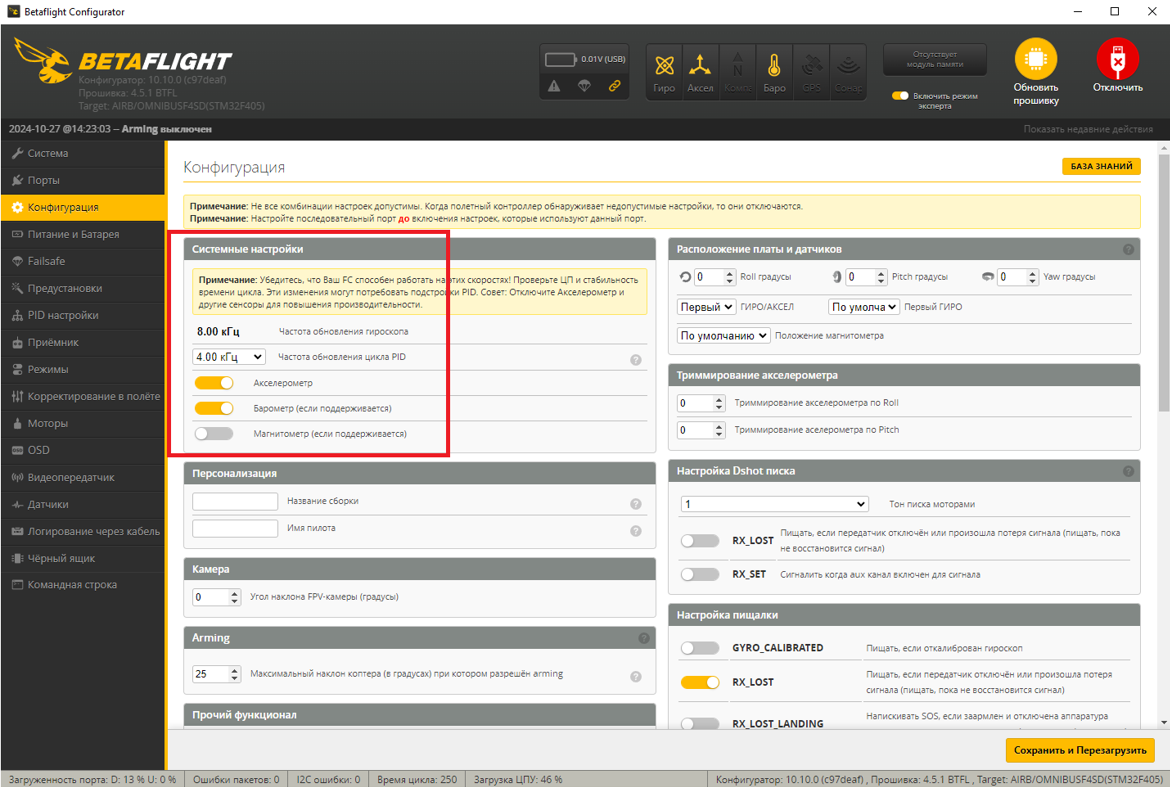
На вкладке Конфигурация отметьте частоту вашего ПИД-контура. Вы можете выбрать между 4 кГц и 8 кГц в зависимости от ваших предпочтений и загрузки ЦП (убедитесь, что она не превышает 75% в соответствии с рекомендациями разработчиков Betaflight). Контроллеры полета F4 обычно поддерживают 4 кГц, а F7 и H7 поддерживают 8 кГц. Если ваш FC использует гироскоп BMI270, вы можете установить его только на 3,2 кГц независимо от процессора.
Перейдите на вкладку Двигатели.
Для частоты контура ПИД 3,2 кГц и 4 кГц - выберите протокол ESC DShot300,
Для частоты контура ПИД 8 кГц - выберите DShot600.
Для ESC BLHeli_S опции зависят от процессора ESC :
- используйте 4 кГц или 3.2 кГц (BMI270) looptime и DShot300 для ESC типа «H» (процессор BB2);
- используйте 2 кГц или 1.6 кГц (BMI270) looptime и DShot150 для ESC типа «L» (процессор BB1).
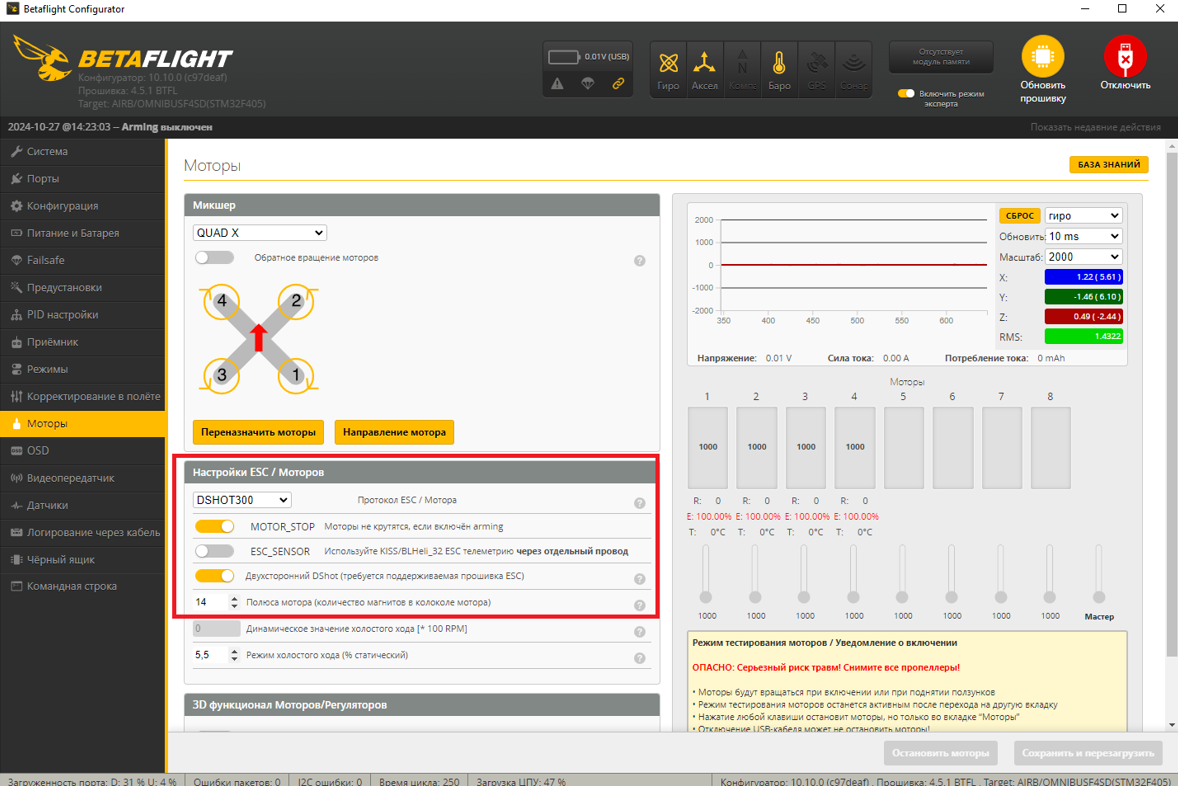
Включите двунаправленный DShot и установите соответствующее число полюсов двигателя.
Чтобы определить полюса двигателя, посчитайте магниты в двигателе. Общие рекомендации:
- 14 полюсов в двигателях 22XX, 23XX, 24XX
- 12 полюсов в двигателях 08XX, 11XX, 12XX, 13XX, 14XX, 16XX
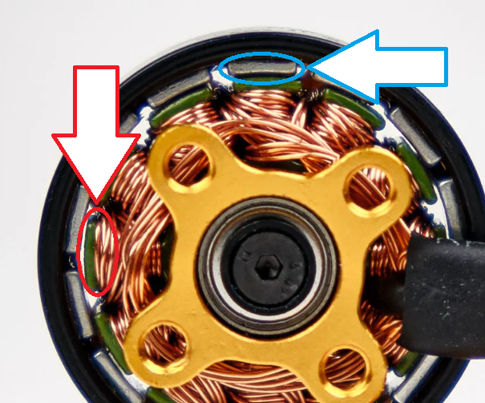
Лучше всего подсчитывать самому, чтобы избежать сюрпризов. Если вы введете неправильное число, фильтрация не будет работать должным образом (не будет сообщаться правильный RPM).
На вкладке двигатели ошибка DShot может иметь вид «E:100%», что является нормальным.
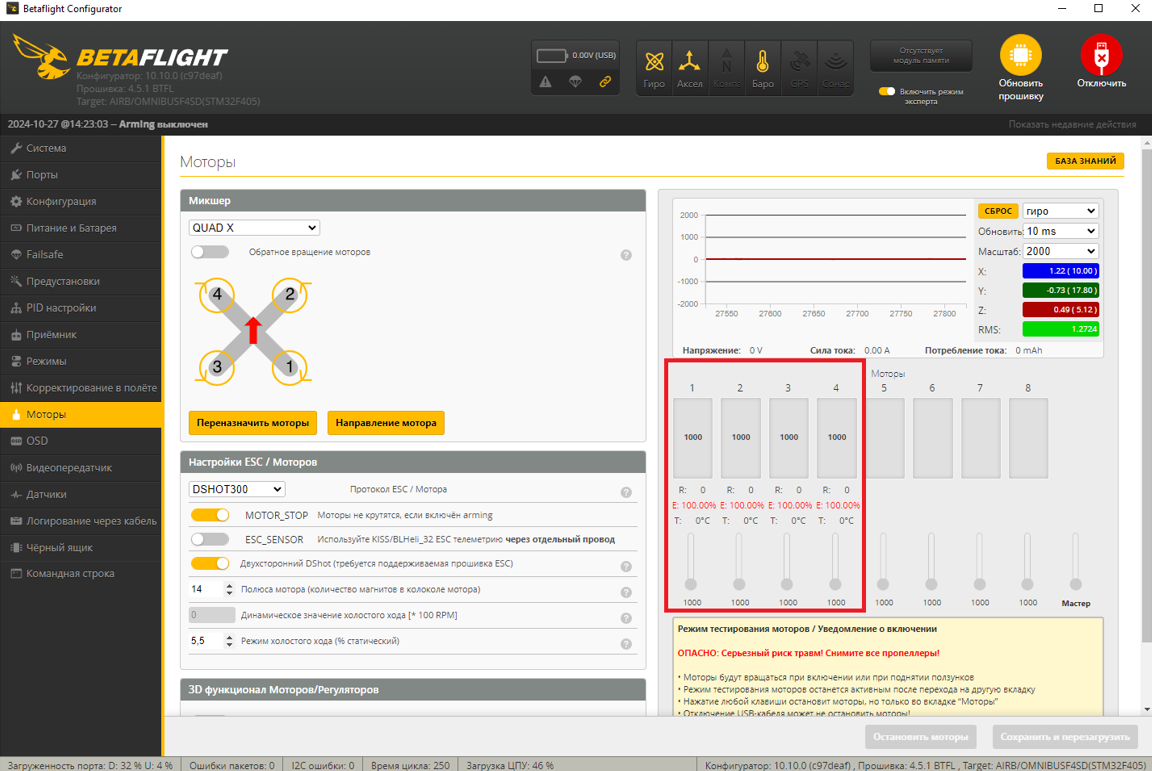
После подключения батареи это значение должно упасть до 0%. Если нет, что-то не так — попробуйте установить более медленное время цикла, если работает 8 кГц/8 кГц.
Если отображается «E: 0,00%», проверьте двигатели, осторожно поднимая ползунки, чтобы убедиться, что они работают правильно.
На вкладке Настройка ПИД в разделе Параметры фильтра параметр Фильтр оборотов гироскопа должен быть включен автоматически после включения двунаправленного Dshot, но этот параметр следует дважды проверить.
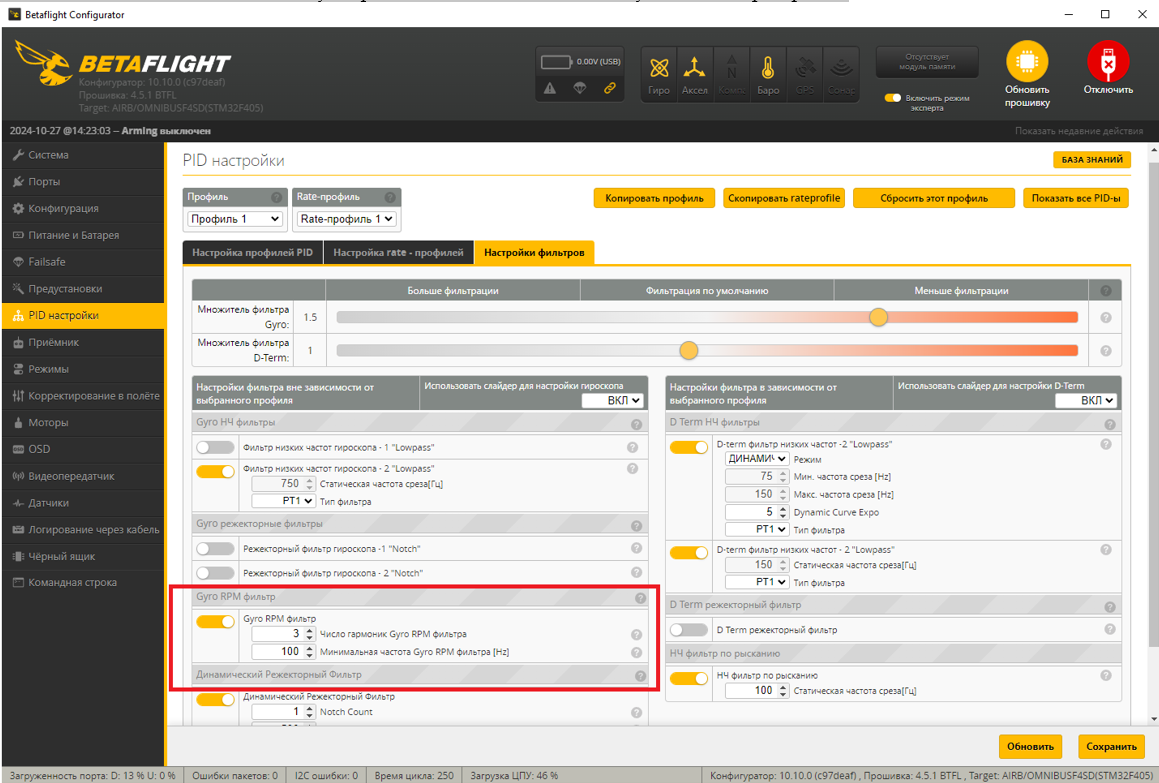
По умолчанию фильтр RPM нацелен на 3 гармоники для каждого двигателя на каждой оси (всего 36 режекторных фильтров). Настройка числа гармоник может улучшить производительность фильтрации шума или минимизировать задержку, но обычно достаточно трех.
Теперь, проведите тестовый полет вашего квадрокоптера. БПЛА должен работать заметно лучше с точки зрения плавности, и это позволяет вам дополнительно уменьшить другие фильтры, чтобы вы могли улучшить его производительность.
Уменьшение фильтрации
Простое включение фильтра RPM без каких-либо дополнительных действий может сделать полет вашего квадрокоптера более плавным и сохранить моторы холоднее. Но вам следует воспользоваться подавлением шума от фильтра RPM, чтобы уменьшить необходимость в фильтрах нижних частот. Это должно привести к лучшим летным характеристикам.
При включении фильтра RPM Betaflight автоматически снижает динамический режекторный фильтр (количество режекторных фильтров уменьшено с 3 до 1, фактор добротности сужен с 300 до 500). Проверьте свой квадрокоптер, чтобы увидеть, как он отреагирует на это изменение.
Если двигатели остаются холодными, рассмотрите возможность уменьшения фильтрации гироскопа и D-терма.
Мы будем использовать два ползунка в верхней части вкладки фильтра (Gyro Filter Multiplier и D term Filter Multiplier). Эти ползунки автоматически регулируют значения фильтра под ними, когда вы перемещаете их влево или вправо.
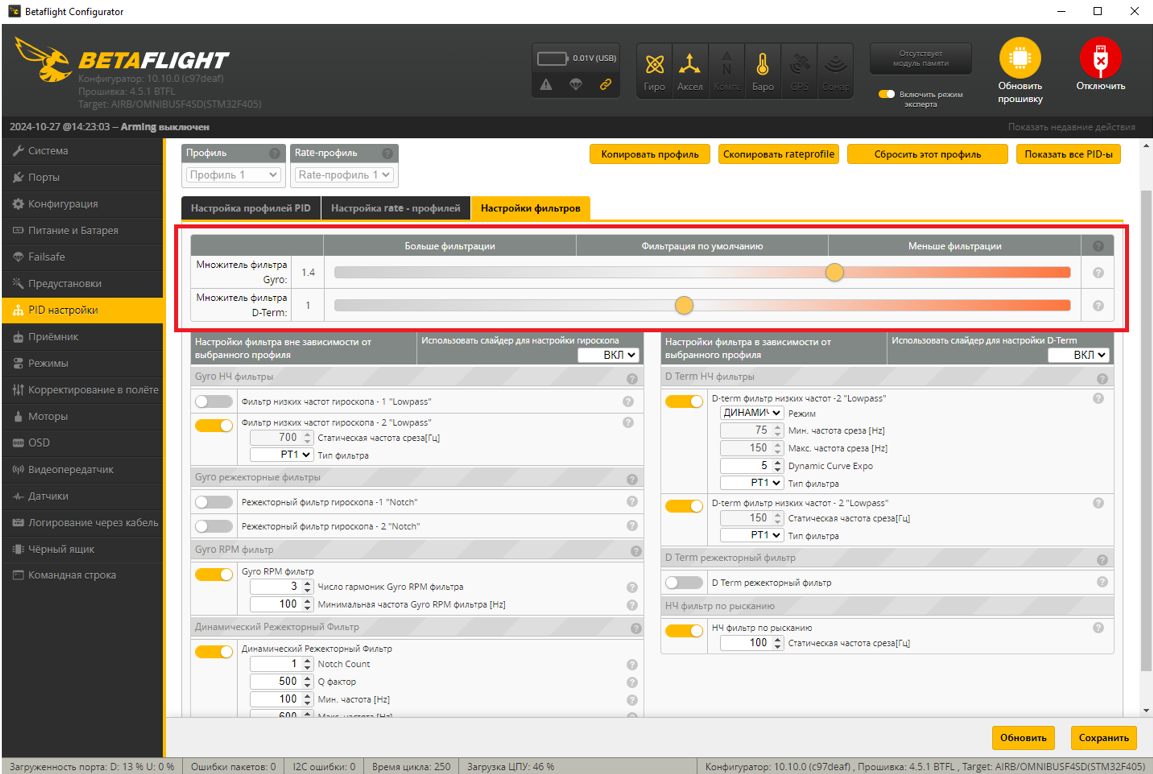
Сначала попробуйте отключить фильтр Gyro Lowpass 1 (но никогда не отключайте Gyro Lowpass 2 для сглаживания). Если моторы работают прохладно, продолжайте. Если нет, снова включите Gyro Lowpass 1.
Затем постепенно переместите оба ползунка вправо для уменьшения фильтрации, проверяя свой квадрокоптер после каждой регулировки. Проверьте температуру двигателя и определите, можете ли вы еще больше уменьшить фильтрацию. Помните, что даже при холодных двигателях недостаточная фильтрация может негативно повлиять на производительность вашего квадрокоптера — температура двигателя — не единственный фактор!
Проверка работы фильтра RPM на БПЛА
Чтобы проверить, активен ли фильтр RPM на вашем квадрокоптере, перейдите на вкладку Motors в Betaflight и раскрутите свой мотор. Под числом Throttle вы должны увидеть «число R», которое представляет собой реальные обороты мотора.
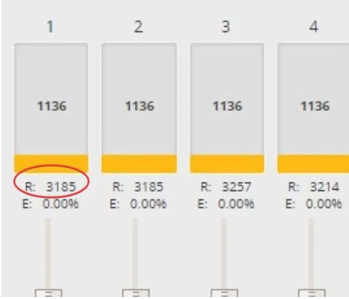
Если число R отсутствует, значит фильтр оборотов двигателя на вашем БПЛА неактивен.
Заключение
В заключение, настройка фильтра RPM в Betaflight значительно улучшает летные характеристики вашего квадрокоптера за счет снижения шума и вибраций двигателя. Следуя этому руководству, вы сможете уверенно включать и оптимизировать фильтры RPM, что сделает более плавным полет и улучшит общую производительностью квадрокоптера.